
快科技3月16日消息,据报道,我国首台太空采矿机器人在中国矿业大学诞生,标志着我国在太空资源开发领域取得重大突破。
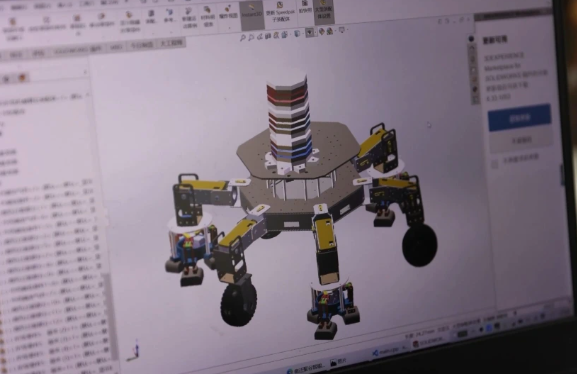
与当下流行的人形机器人和机器狗不同,这款太空采矿机器人采用独特的六足设计,配备三个轮足和三个爪足,专为地外星体复杂环境下的地质勘探和矿物采集任务而打造。
在地球上,钻探作业可以利用重力使钻头深入地表。然而,月球重力仅为地球的六分之一,小行星更是处于微重力环境,传统的钻探方式难以奏效。为了解决这一难题,科研团队从自然界汲取灵感,模拟昆虫爪刺结构,为机器人设计了特殊的爪刺足,有效克服了失重环境下的漂移问题,确保钻头能够稳定钻进星体表面。
除了应对微重力挑战,太空采矿机器人还采用了仿生六足移动结构,足末端配备车轮和锚固结构两种配置,使其能够灵活适应小行星坑洼不平的地表环境。目前,该机器人原型机已申请专利并通过初审。
经过在沙盘上的反复训练,太空采矿机器人已能够通过六足差动系统悬架、离合器等协同工作,根据工作环境调整自身结构形状,以应对地外星体复杂多变的地表环境。
为了进一步提升勘探能力,太空采矿机器人将在中国矿业大学深地工程智能建造与健康运维全国重点实验室进行进阶训练”。该实验室能够精准模拟月球表面极端环境,为机器人提供更接近实战的训练条件。
自20世纪50年代末以来,全球已成功发射80多个月球探测器和载人飞船,积累了丰富的月球探测数据。目前,中国、美国、俄罗斯等国都已制定载人登月计划,月球资源有望成为人类最先开发利用的太空资源。此外,太阳系中数量众多的小行星也蕴藏着丰富的矿产资源,其中近地小行星由于轨道距离地球较近,具有较高的开采价值和可采性,目前已发现1500多颗具有开发潜力的近地小行星。
中国首台太空采矿机器人的问世,为我国参与太空资源开发奠定了坚实基础。相信随着技术的不断进步和应用的不断深入,太空采矿机器人将在未来太空资源开发中发挥重要作用,为人类探索宇宙、利用太空资源贡献力量。
(举报)